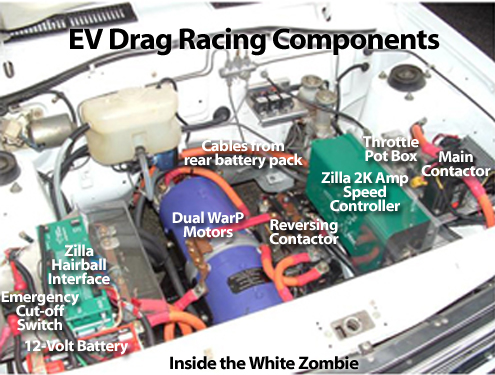
Basic Components | Motor Tech | Battery Tech | Battery Management Systems
Transmissions | Gearing | CG Placement | Downloads | Parts and Supplies | Safety
By Bill Dube
Cooling
The biggest single thing you can do to help with motor survival is to cool the motors well between runs. Pull air through the motor vents with a shop vac. (Pull, don't blow. The exhaust from the shop vac is quite warm from cooling its own motor.)
Stoning the comm
A clean commutator will prevent arcing and extend brush life. The access to the commutator is a bit limited, so you need a stone that is at most 1/2 inch thick. You can purchase comm stones from McMaster-Carr at:
http://www.mcmaster.com/#commutator-stones/=i9hjvr
Max current
Stock brush shunt wires last to about 1200 amps and may take up to 1400 amp. They are most definitely the weak link in the chain of conductors within the motor.
Consider thicker brush wires
Double up the brush "shunt" wires, or replace them with larger gauge wire.
Running in the motor (Seating the brushes)
Before installing a new motor, it's a good idea to break it in or run it in to seat the new brushes. Seating the brushes conforms the brushes to fit the curvature of the commutator increasing the surface area of the brush.
Run the motors on the bench for a "week" on 6 to 12 volts. You will need a big power supply to do this as it takes about 30 amps to spin each of these motors. A 12 volt RV power supply & battery charger works well. An ordinary 12 volt auto charger will go up in smoke, even if it is labeled for 50 amp capacity. After you have run in the brushes, thoroughly blow out all the brush dust. Don't inhale the dust.
Any time you replace brushes, you should stone the comm, and seat the brushes with a run in. If you are in a rush, you can stone the comm, pull a brush to see if it is seated all the way across, then repeat until the brushes are all seated ~90% across.
Other methods to seat brushes
Use a hole saw in a drill press or milling machine the same diameter of the comm in
to pre-shape the brushes. I just clamp each brush in the vice and saw off a thin slice of the end with the hole saw.
The classic method is to wrap the comm with sandpaper, put in the brushes, and turn the motor by hand until the brushes show a curve all the way across. Gets the motor all dirty with brush dust, and gets masking tape residue on the comm, however.
Brush temps
In the 8 seconds of a drag race, you really don't learn much measuring brush temps. Watch the color of the copper braids on the brushes instead. They start turning a little blue and you know you are pushing the edge.
Brush timing
If you have not done so, you should advance the brush timing a bit from the stock position. This makes a huge difference in arcing, temperature, and survival. You drill new 1/4-20 end bell holes "ahead" of the stock ones in the steel body of the motor shell. You want to slightly rotate the brush end bell in the direction "opposite" to the rotation of the motor. Drill and tap the new holes approximately 3/8 inch ahead of the stock holes.
Don't try to do this in the vehicle. It will be much faster to do it out of the vehicle in a drill press.
Motor voltage
The high voltage (120 volt rated) motors don't seem to survive at high currents (and voltages) on the drag strip as well as the 72 volt motors. The GE motor in Shawn Lawless' Rocket bike started out as a 24 volt forklift motor but can go over 200 mph.
Gyptal the motor
Paint the "entire" inside of the end bell area with "Dolph Spray ER-41" or Glytol. Mask the inside of the brush holders and the bearing cup, and cover _everything_ else with ER-41. Any exposed metal, including the terminals, end bell, ends of the field windings, screw heads, springs, "everything" needs to have a continuous
uninterrupted insulating coating. Give the arc nowhere to strike.
Use a non-conductive brush shield
Practically all motors come with a perforated brush shield that clamps around the motor.
Toss the stock sheet metal shields for the brush access ports and make new ones from something non-conductive like very thin G-10 (FR4).
http://www.mcmaster.com/#catalog/118/3616/=i9ht7s
Make a duplicate of the stock shields and then cover the holes with fiberglass bug screen. If you don't do this, you will suck in crap from the track. (Which may explain why many motors go up in smoke.)
EVs have two battery systems.
The low voltage system uses a 12 volt battery to operate the usual 12 volt accessories like lights and also the low voltage controls of the speed controller and Battery BMS. Generally, a lead-acid battery is used for the 12 volt system just like a gas car.
The high voltage system or propulsion battery powers the motor through the speed controller and is made up of a large battery pack ranging from from 24 to 600 volts.
Typical battery chemistries are Lead and Lithium. Lithium batteries are the prefferred battery today for drag racing because they are lighter and have higher energy density than lead. Lithium modules can be sourced from EV conversion suppliers and recyclers that specialize in used battery packs from Teslas, Chevy Volts and Nissan Leafs. 12 volt sealed lead batteries like Optimas and Hawkers were popular in the early days but because of their weight and size they are generally more applicable for the lower voltage vehicles.
The Battery Management System monitors the cell voltage of the typical lithium battery pack and during the charge cycle keeps the cells to within a specified limit within a thousandth of a volt. The most common BMS is from Orion which can be configurable to several different lithium batteries.
By Bill Dube
The fastest EV drag racing cars have no transmissions. There are physical reasons for this. It is not just a matter of preference or opinion.
The main reason you don't need a transmission on an EV is that torque curve on an ICE and an electric motor are totally different. An ICE has a "hump" that starts delivering useful torque at about 2000 RPM and falls off at, say, 8,000 RPM. An electric motor delivers a flat torque starting at 0 RPM that stays flat until you hit the battery pack HP limit at, say, 7000 RPM, and then slopes downward holding a constant HP until the motor comes apart. Because of the "hump" in the ICE torque curve, you have little of no choice but to run a transmission. Remove the torque "hole" at low RPM, and you remove the need for a transmission.
The maximum torque is a combination of motor thermal limits (motor size basically) and controller output current limit (controller cost basically.) Put more amps through the motor and you get more torque. Put more volts through the motor, and you get higher rpm. Size the motor and controller properly, and the transmission is eliminated completely.
When you run a series of simulations that include the traction limit of the tires, the rotational inertia of the transmission, the weight or the transmission, the weight of the motor, and the weight of the controller, you discover that increasing the size of the controller and the motor win out over adding a transmission. The very fastest
EVs prove that the simulations are correct.
If we start with a blank sheet of paper (and a blank check) you can see how it all works.
The best possible performance dragster has enough torque to spin the tires the entire 1/4 mile. This means that the torque at the end of the 1/4 is as much as it is at the starting line, right at the traction limit. If you have the torque in the highest gear to spin the tires, then you have at least that much torque in high gear at zero RPM. No need for a lower gear since full torque is available at zero RPM (unlike the ICE.)
If we move away from "I want to go as fast as possible." to "I want to go as fast as my budget will allow." you may find yourself in the range where a transmission is a reasonable solution. It won't be the fastest car or bike, however. That vehicle will cost more and will not have a transmission.
Quickest ICE dragsters have no transmissions
Top of the heap, modern top fuel ICE dragsters, funny cars, and bikes have no transmissions. They run the engine at full RPM and use the clutch slip to control the torque to the wheels. This is because they have enough torque to spin the wheels in top gear, (so there is no need for a lower gear) and they hold the engine on the
top of the torque curve by slipping the clutch. In an EV, the torque curve is flat and the motor does not need to idle, so you don't even need the clutch (if you have a controller.)
Better methods
In the early EV drag racing, before big HP controllers existed, Ed Rannberg simply ran a slipper clutch to control torque delivery to the rear wheel. (He also used series/parallel shifting.) That put him in the 11's with lead-acid.
Field weakening can extend the useful range of a given controller. It gets the effect of a transmission, but without adding significant weight or the huge cost of a more powerful controller (and pack) with higher voltage output.
Series/parallel motor shifting. Adds little weight, but adds performance similar to shifting gears when controller limited.
This is a new section. Information coming soon.
By Bill Dube
Polar moment
For handling, you can have too little polar moment and the vehicle becomes too "twitchy". That is, it can turn quicker than you can react and steer it straight. ("Altereds" are notorious for this.) Adding or moving weight to the edges of the car, or lengthening the car increases the polar moment. This makes the car naturally more
stable. Weight on the perimeter of the car, away from the center of the car, makes the whole car a better "flywheel" that will spin less quickly about its axis.
More total weight takes more HP to accelerate. It slows you down in general.
CG placement
The placement of the vehicle CG in relation to the rear contact patch is probably the very most important consideration. On major tracks in the Western USA (and at a few key Eastern tracks) the coefficient of friction is close to 3.0. This means that the traction "balance point" puts the CG on a "traction line" from the contact patch 18
degrees off the pavement. (For tracks with less traction, that angle might be as much as 25 degrees. For ordinary dry pavement, that angle gets close to 45 degrees.)
If you place the CG above the traction line, (typical position) then the vehicle will lift the front wheels. If you place the CG below that traction line, the rear wheels will spin without lifting the front wheels. On a drag bike, the weight of the rider brings the CG
above the 18 degree traction line. Thus, you build the vehicle itself to have a CG very nearly on the line.
If the CG is on (actually just slightly above) the traction line, moving it further back will result in more traction at the very beginning of the launch sequence. It will make the vehicle less sensitive to track conditions.
If the CG is on the traction line (again just slightly above) moving it forward will result in slightly reduced initial traction, but increase the pitch momentum. This means with the proper set-up, you can rotate (pitch) the frame backward and thus "squat" the vehicle, pressing the rear tire against the pavement with more force than the total weight of the vehicle. The more forward CG position will make the vehicle more sensitive to the track prep. however. Also, a more forward CG makes the vehicle more stable in terms of handling. It wants to go heavy-end first.
If you think about it, you goal is to arrange the weight in the vehicle to place the CG in the best place, and spread that weight out front, back and to the sides to get the largest polar moment while achieving the optimal CG position.
Zilla Owners Manual (PDF 730k)
Please visit our Components page for a complete list of components and parts.
There are risks involved in working on an EV. Here are some safety precautions to consider.
Always isolate the propulsion battery pack from the frame of the vehicle. The propulsion pack should never be grounded.
Raise the vehicle off the ground when testing drive components. While the vehicle is undergoing construction and you are at the point where the propulsion batteries are installed and wired to the controller it's a good idea to keep the drive wheels off the ground until the vehicle passes initial tests. Do your first drivetrain and component tests with the wheels off the ground.
Wear a face shied or goggles when working around batteries.
Tape up the ends of wrenches so if they fall they don't short out across battery terminals.
Keep a Type 6 fire extinguisher ready.
When testing charging components for the first time, check in periodically and closely monitor charging progress. Check for any loose connections that can cause a hot spot that could lead to battery terminal or cell failure.
